Torque Physics Simulation
Interactive visualization of moment of force and rotational dynamics
Force Parameters
Force Magnitude (N)
50 N
Force Angle (θ)
90°
Position Vector
X Component (m)
50 m
Y Component (m)
0 m
Torque Calculation
τ = r × F = |r||F|sinθ
Torque Magnitude:
0 N·m
Torque Direction:
Out of plane
Position Vector Magnitude:
0 m
Angle Between Vectors:
0°
Position Vector (r)
Force Vector (F)
Angle (θ)
Torque (τ)
Simulation Controls
Animation Speed
Normal
About Torque
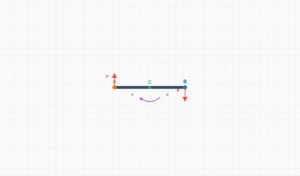
Torque (τ) is the rotational equivalent of linear force. It measures how much a force acting on an object causes that object to rotate about an axis.
The magnitude of torque depends on three factors: the magnitude of the force (F), the distance from the axis (r), and the angle between the force vector and the position vector (θ).
Mathematically, torque is the cross product of the position vector (r) and the force vector (F):
τ = r × F = |r||F|sinθ
The direction of the torque vector is perpendicular to the plane formed by r and F, determined by the right-hand rule.